人脸特征点检测
predictor_path = 'path/to/shape_predictor_68_face_landmarks.dat'
img = 'the/face/you/want/to/predict'
detector = dlib.get_frontal_face_detector()
predictor = dlib.shape_predictor(predictor_path)
dets = detector(img, 1)
shape = predictor(img, d)
get_frontal_face_detector
detector返回的dets是识别出人脸区域对应的矩形。 第二个参数1,表示将图片放大(upsample)1倍,这是为了使图片中的东西更大,更利于我们检测人脸
shape_predictor
predictor的输入参数d是代表从d这个矩形范围内找landmark。 predictor返回的shape就是检测出的68个特征点(face_landmarks),我们可以调用shape.part(0) ... shape.part(67)得到每一个特征点对应的坐标。
Affine Transform
![]()
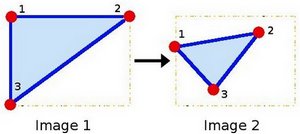 通过函数getAffineTransform得到A状态到B状态的转换矩阵
再调用warpAffine将图片做Affine Transform.
通过函数getAffineTransform得到A状态到B状态的转换矩阵
再调用warpAffine将图片做Affine Transform.
statusA = [(beforeA.x, beforeA.y),(beforeB.x, beforeB.y),(beforeC.x, beforeC.y)]
statusB = [(afterA.x, afterA.y),(afterB.x,afterB.y),(afterC.x, afterC.y)]
H = cv2.getAffineTransform(stautsA, stautsB)
warpedImg = cv2.warpAffine(img, H, np.shape(img)[0:2])
还有cv2.getRotationMatrix2D(center, angle, scale)是得到一个旋转angle度的Affine Transform Matrix。
openface的face align
Github上有一个实现FaceNet的开源代码openface,它是先face align,然后用对齐后的人脸输入FaceNet得到特征,然后求其欧式距离得到两张图片的差异。
其中人脸对齐部分代码的思想是:
1.得到face landmark
2.将眼睛,鼻尖这三点通过Affine Transform映射到三个点,然后对整张图片进行Affine Transform.
3.再计算face landmark,求face landmark的所有点的外接矩形为裁剪后的对齐人脸。
Comments
comments powered by Disqus